
Desktop conformal txheej tshuab
-
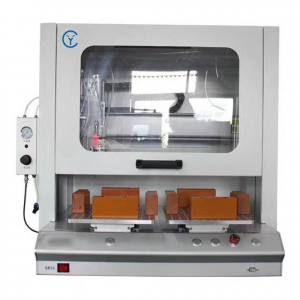
CY Desktop Conformal Txheej Tshuab CY-400A
Siv tau kua nplaum:Haum rau cov kua nplaum uas tsis muaj viscosity lossis kua dej xws li cov xim sib txawv
1.Nws muaj kev ua haujlwm xws li txuas ntxiv tweening ntawm cov ntsiab lus, kab, qhov chaw, arcs, lub voj voog, thiab cov nkhaus tsis sib xws, thiab paub txog 3D tsis-planar trajectory paths;
2.Nws muaj kua nplaum ntim thiab tuab, kua nplaum ceev ceev, kua nplaum nplaum lub sij hawm, kua nplaum kaw lub sij hawm, ua ntej Lub sij hawm kua nplaum tuaj yeem tsim los ntawm qhov tsis;
3.Nws muaj lub luag haujlwm ntawm kev ceev dotting, kos kab, kos lub voj voog thiab lwm yam kev ua haujlwm tsis tu ncua ntawm cov khoom dav hlau;
4.Nws muaj cov haujlwm ntawm thaj chaw array, kev txhais lus, kev sib hloov thiab lwm yam haujlwm, thiab tuaj yeem txhawb nqa DXF ntshuam programming muaj nuj nqi;
5.Nws muaj kev ua haujlwm ntawm nqus rov qab;
6.Kev txhawb nqa dual ua haujlwm platform thiab dual khau raj hom;
7.Driving hom: stepper motor + siv tsav;
8.Dispensing method: tshuaj tsuag valve dispensing;
9.Lub XYZ axis txais stepping motors, uas tuaj yeem txhim kho cov lus tsa suab kom raug thiab rov ua dua;
10.Cov qauv tsim qauv yog yooj yim rau kev saib xyuas thiab tu;